


Dla pasjonatów i nie tylko
Sterownik NXT
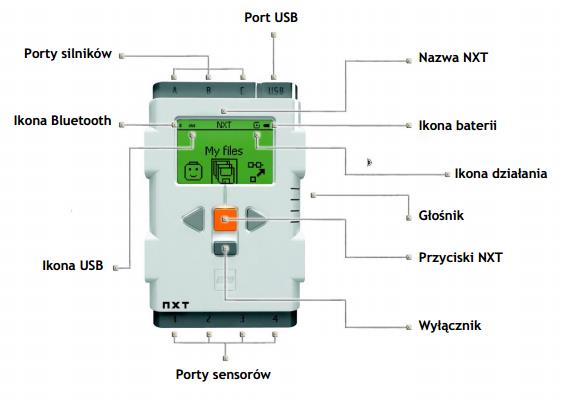
NXT jest mózgiem robota MINDSTORMS. To inteligentny, sterowany komputerowo klocek LEGO, który pozwala robotowi MINDSTORMS obudzić się do życia i wykonywać różne czynności. Posiada on wyświetlacz LCD o rozdzielczości 100x64 piksele, na którym wszystkie informacje wyświetlane są w języku angielskim.

Sterownik NXT zawiera:
- Główny mikrokontroler: 37- bitowy mikrokontroler firmy Atmel- ARM7
- 256 KB pamięci FLASH
- 64 KB pamięci RAM
- 48 MHz
- Pomocniczy mikrokontroler: 8-bitowy mikrokontroler firmy Atmel- AVR
- 4 KB pamięci FLASH
- 512 bajtów pamięci RAM
- 8 MHz
- Bezprzewodową komunikację Bluetooth CSR BlueCoreTM 4 v2.0
- SPP
- 47 KB wewnętrznej pamięci RAM
- 8 Mb zewnętrznej pamięci FLASH
- 26 MHz
- Port USB 2.0 (12 Mb/s)
- 4 porty wejściowe – połączenie przy pomocy kabla 6-żyłowego
- 1 port wysokiej prędkości zgodny ze standardem IEC 61158 typ 4/EN 50170
- 3 porty wyjściowe – połączenie przy pomocy kabla 6-żyłowego
- obsługują sygnały zwrotne z enkoderów
- Wyświetlacz LCD o rozdzielczości 100x64 pikseli
- rozmiar 26 x 40.6 mm
- Głośnik - 8 bitowa rozdzielczość i częstotliwość próbkowania 2-16 kHz
- 4 gumowe przyciski użytkownika
- Źródło zasilania – 6 baterii AA
- zalecane baterie alkaiczne
- dostępne są ładowalne litowo-jonowe baterie 1400 mAh
Łączenie elementów ze sterownikiem NXT

1) Podłączanie napędów

Napędy podłączane są do sterownika NXT za pomocą kabla 6-żyłowego dołączonego do zestawu. Jeden koniec kabla mocuje się do portu silnika, a drugi do jednego z portów wyjściowych sterownika NXT. Porty wyjściowe, służące do obsługi napędów, są oznaczone literami A,B,C.
2) Podłączanie sensorów

Sensory podłączane są do sterownika NXT za pomocą kabla 6-żyłowego dołączonego do zestawu. Jeden koniec kabla mocuje się do portu czujnika, a drugo do jednego z portów wejściowych sterownika NXT. Porty wyjściowe, służące do obsługi napędów, są oznaczone cyframi 1,2,3,4.
3) Połączenie z komputerem

Komputer może komunikować się ze sterownikiem NXT na dwa sposoby. Pierwszy z nich wykorzystuje bezprzewodową łączność Bluetooth. Jeśli komputer nie posiada modułu pozwalającego mu na komunikację siecią Bluetooth pozostaje wykorzystanie kabla USB. Komunikacja z komputerem umożliwia przesyłanie programu sterującego do sterownika NXT.
Serwosilnik NXT
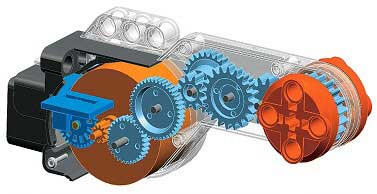
Każdy zestaw Lego Mindstorms posiada trzy serwosilniki, które pełnią rolę napędów. Każdy z nich zawiera enkoder obrotowy o rozdzielczości 360 impulsów. Oznacza to, że możliwe jest odczytywanie położenia kątowego silnika co 1o i wysyłanie wiadomości zwrotnej o bieżącym położeniu do sterownika NXT. Dzięki zastosowaniu specjalnego kabla z wtyczką podobną do telefonicznej, możliwe jest zasilanie napędu stałym napięciem na poziomie 9 V. Napięcie to jest generowane w sterowniku przy pomocy sześciu baterii 1,5 V.

Firma Lego zaprojektowała i wypuściła na rynek wiele rodzajów silników, lecz model NXT charakteryzuje się największą wartością momentu obrotowego. Uzyskano ją poprzez zastosowanie przekładni dużym przełożeniu.
Podstawowe parametry serwosilnika NXT:
Masa
80 g
Prędkość obrotowa
170 obr/min
Prąd bez obciążenia
60 mA
Moment przy prądzie 2 A
50 Ncm
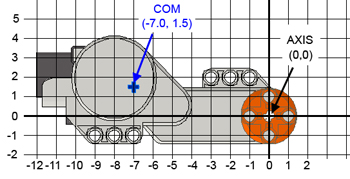
Współrzędne środka ciężkości względem układu współrzędnych osi silnika:
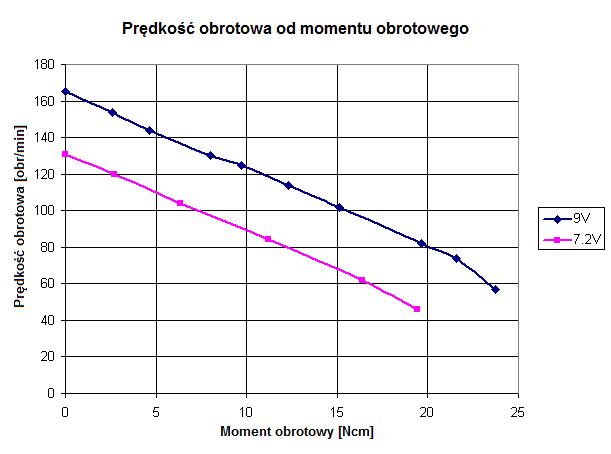
Zmiana parametrów silnika względem zmian napięcia:
Napięcie [V]
Moment obrotowy [Ncm]
Prędkość obrotowa [obr/min]
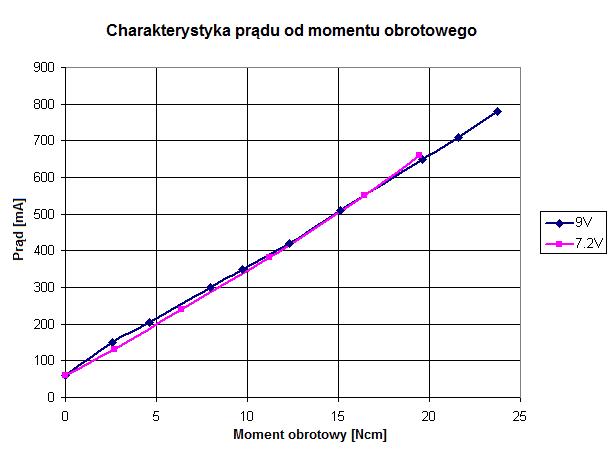
Prąd [mA]
Moc [W]
Sprawność [%]
4.5
16.7
33
0.6
0.58
21.4
7
16.7
82
0.55
1.44
37.3
9
16.7
117
0.55
2.03
41
12
16.7
177
0.58
3.10
44.5
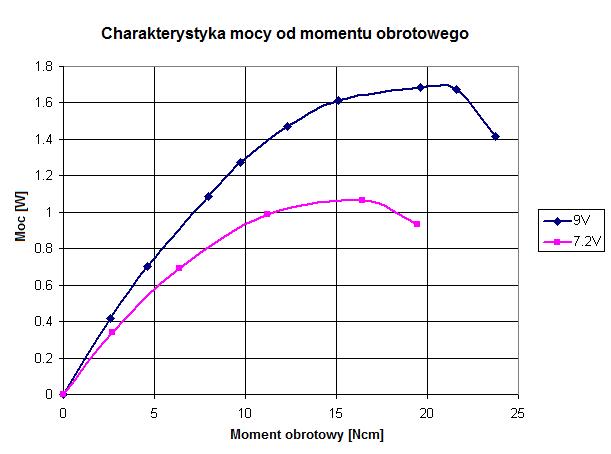
Przedstawione poniżej charakterystyki biorą pod uwagę dwie wartości napięcia: 9 V i 7.2 V. Pierwsza wartość to pełne napięcie, w przypadku gdy do zasilania używa się baterii alkalicznych (1.5 V), natomiast drugą wartość napięcia uzyskuje się poprzez zastosowanie akumulatorów niklowo-metalowo-wodorowych (1.2V).
Czujnik dotyku NXT
Czujnik dotyku pozwala robotowi odczuwać dotyk. Wykrywa on na kiedy został naciśnięty oraz ponownie zwolniony. Podstawowo może pracować w trzech trybach:
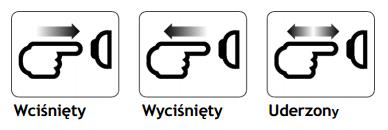
- Reaguj na wciśniecie
- Reaguj na zwolnienie
- Reaguj na uderzenie (wciśniecie i zwolnienie)
Czujnik ten może być wykorzystywany przy do wielu zadań takich jak wykrywanie uderzenia w przeszkodę, zliczanie ilości jego wciśnięć (np. przy zamontowaniu czujnika do nogi robota, zliczając ilości jego wciśnięć możemy określić jak daleko robot się przemieścił), wydawanie robotowi poleceń przy pomocy wciskania czujnika (po wciśnięciu czujnika robot np. zacznie się poruszać lub wydawać dźwięki) itp.
Czujnik koloru NXT

Czujnik koloru to zaawansowane urządzenie, które pozwoli stworzonemu obiektowi rozróżniać kolory, oraz światło od ciemności. Potrafi on wykryć sześć różnych kolorów, odczytać natężenie światła, oraz zmierzyć intensywność oświetlenia kolorowych powierzchni. Czujnik koloru może być także wykorzystany jako wielobarwne źródło światła. Urządzenie składa się z dwóch podstawowych elementów - diody LED oraz fotodetektora. Dioda jest w stanie emitować światło w jednym z trzech kolorów: czerwonym, zielonym i niebieskim. Podczas pomiaru oświetla ona badany obiekt, a detektor wykrywa natężenie odbitego od niego światła. W ten sposób czujnik jest w stanie szybko zidentyfikować każdy z sześciu podstawowych kolorów. Po wyłączeniu diody, zmienia się on w czujnik natężenia światła.
Aby rozpoznawanie kolorów przebiegało optymalnie, czujnik powinien być umieszczony pod lekkim kątem w odległości około 1 cm do powierzchni. Niewłaściwe odczyty koloru mogą wystąpić, jeżeli czujnik ustawiony jest pod niewłaściwym kątem lub pracuje przy jasnym oświetleniu.
Czujnik może być stosowany do odczytywania pojedynczej wartości natężenia światła. Taki tryb pracy zapewnia ustawienie koloru światła na czerwony. Czujnik może odczytywać zarówno natężenie oświetlenia otoczenia, jak i światła odbitego od powierzchni. Do pomiaru światła odbitego można wybrać dowolny kolor oświetlenia.
Ultradźwiękowy czujnik odległości NXT

Czujnik odległości pozwala na zmierzenie dystansu pomiędzy obiektem, na którym jest zamontowany, a najbliższą przeszkodą. Działa on na zasadzie echolokacji – z prawej strony urządzenia znajduje się piezoelektryczny przetwornik ultradźwiękowy, który zmienia energię elektryczną w ultradźwięki, niesłyszalne dla ludzkiego ucha. Po napotkaniu przeszkody odbijają się i powracają do czujnika, w którym kolejny przetwornik zmienia je w sygnały elektryczne. Elektronika automatycznie mierzy czas od nadania do odebrania sygnału, przelicza go na odległość od przeszkody (dzieląc na 2 i mnożąc przez prędkość dźwięku), po czym wysyła wynik do sterownika NXT. Maksymalna odległość jaką czujnik może zmierzyć to około 255 centymetrów, a jego dokładność to +/- 3 centymetry. Należy pamiętać, iż zastosowanie więcej niż jednego czujnika, spowoduje wzajemne zakłócanie sygnałów.
Czujnik ciśnienia i temperatury NXT

Czujnik ciśnienia może być wykorzystany do budowy stacji pogodowej albo czujnika wysokości. Można go wykorzystać do pomiarów ciśnienia i temperatury. Pomiaru ciśnienia dokonuje on z dokładnością do 1/1000 [inHg], czyli ok. 3,39[Pa], a temperatury z dokładnością do 1/10 oC. Oprogramowanie pozwala odczytywać wartość ciśnienia w calach słupa rtęci [inHg] oraz hektopaskalach [hPa], a temperaturę w stopniach Celsjusza [oC] oraz stopniach Fahrenheita [oF]. Raz dostosowany do aktualnych warunków czujnik może podawać wysokość w metrach lub stopach.
Czujnik kąta obrotu NXT

Czujnik mierzy kąt obrotu oraz prędkość obrotową. Pozwala on mierzyć trzy parametry obrotu:
- kąt absolutny – kąt obrotu osi od 0o – 359o z dokładnością do 1o
- kąt skumulowany – suma kątów jakie przebyła kręcąca się oś
- prędkość obrotową – prędkość z jaką obraca się oś w obr/min
Dzięki niskiemu tarciu w mechanizmie czujnik kąta obrotu jest idealny do budowy modeli, w których dokładność pomiaru kąta obrotu i wielkości z nim związanych jest kluczowa. Nadaje się on doskonale do np. mierzącego przebytą drogę koła czy wiatraka stacji pogodowej.
Czujnik kierunku NXT

Czujnik kierunku NXT jest cyfrowym kompasem, który dokonuje pomiaru ziemskiego pola magnetycznego i zwraca wartość odpowiadającą aktualnemu kierunkowi. Kierunek podawany jest z dokładnością do 1o jako liczba od 0 do 359. Częstotliwość próbkowania czujnika to 100Hz, a więc odświeża on wartość którą podaje 100 razy na sekundę. Czujnik może pracować w dwóch trybach:
- odczytu – w tym trybie aktualny kierunek jest przeliczany i podawany przez czujnik
- kalibracji – w tym trybie kompas może zostać skalibrowany aby niwelować wpływ pól magnetycznych pochodzących od baterii czy silników, a więc uzyskać maksymalną dokładność.
Czujnik ruchu PIR (passive infrared sensor) NXT

- Czujnik ruchu PIR jest zbliżony w budowie i zasadzie działania do czujników stosowanych w przypadku oświetlenia które załącza się w przypadku wykrycia człowieka lub zwierzęcia. Reaguje on na zmiany pola podczerwieni w polu jego widzenia. Można go wykorzystać jako czujnik ruchu przy konstruowaniu alarmu lub do włączania kamery gdy w polu widzenia pojawi się zwierzę. W bardziej zaawansowanych modelach można go wykorzystać do śledzenia osób, zwierząt lub innych ciepłych obiektów.
Czujnik siły NXT

Czujnik siły pozwala na budowę modeli, które uzyskają zdolność pomiaru fizycznej siły przyłożonej do osi. Czujnik posiada miejsce na przymocowanie osi, a wartość mierzona przez niego jest wartością siły przyłożonej do tej osi. Warto zauważyć, że czujnik mierzy jedynie siłę wzdłużną przyłożoną do osi. Czujnik ten może być użyty jako zwykły czujnik dotyku, jednak w przeciwieństwie do niego nie posiada tylko dwóch stanów wciśnięty / niewciśnięty, ale oprócz tego zwraca wartość jak mocno końcówka pomiarowa została wciśnięta. Dzięki odpowiedniej kalibracji możliwy jest bezpośredni pomiar np. wagi przedmiotu.
Czujnik żyroskopowy NXT

Czujnik żyroskopowy pozwala na pomiar wychylenia bądź obrotu zbudowanych modeli. Zwraca on nie tylko liczbę stopni obrotu na sekundę ale także kierunek obrotu. Dzięki pomiarowi z prędkością 360o/s możemy budować modele, które balansują, bujają się lub wykonują inne akcje w których pomiar wychylenia i związanych z nim wielkości jest kluczowy.
Czujnik przyspieszeń – akcelerometr NXT

Czujnik ten potrafi zmierzyć przyspieszenie oraz wychylenie w trzech osiach: x,y oraz z, w zakresie +/- 2 g. Rozkład osi wygląda tak, jak na poniższym rysunku.
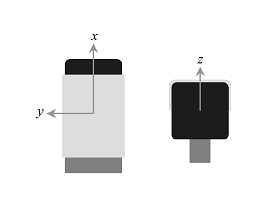
Wartość przyspieszeń w każdej osi mierzona jest 100 razy na sekundę, zatem dzięki temu czujnikowi można nie tylko mierzyć przyspieszenia zbudowanych pojazdów, ale możliwe jest także zbudowanie samopoziomującego się robota.
Czujnik kolorów NXT wersja 2

Czujnik ten, jest nowszą wersją czujnika opisanego powyżej. Jest on jednak bardziej wydajny – lepiej rozpoznaje kolory i ma większy zasięg ich detekcji.
Czujnik zbliżeniowy NXT

Elektro-optyczny zbliżeniowy czujnik EOPD (Electro-Optical Proximity Detector), potrafi dokładnie określić odległość jaka dzieli go od celu, oraz wykryć zmiany w tej odległości. Realizuje swoje zadanie wysyłając wiązki światła, które odbite od przeszkody wracają do czujnika. Po odfiltrowaniu sygnału (w celu uniknięcia zakłóceń przez inne źródła światła) czujnik oblicza energię jaką zawiera dana wiązka. Na podstawie tych informacji czujnik jest w stanie obliczyć odległość.
Urządzenie wysyła wiązki światła z częstotliwością 300 Hz (300 razy na sekundę). Jest więc w stanie stale oraz bardzo dokładnie obliczać bieżącą odległość. Możliwe jest wykorzystanie kilku takich elementów w budowanym modelu, gdyż każdy z nich będzie działał na innej częstotliwości próbkowania, a tym samym nie będą się one wzajemnie zakłócały.
Nadajnik i odbiornik sygnałów podczerwonych NXT

Czujniki te (IRLink i IRReceiver) służą do bezprzewodowego sterowania zbudowaną konstrukcją/pojazdem. Komunikują się one z elementem o nazwie „Power Function Speed Remonte Control” (zaawansowanym joystickiem Lego) poprzez promienie podczerwieni. Jeden z czujników wysyła sygnały do joysticka, natomiast drugi je odbiera i dekoduje. Dzięki temu mamy możliwość bezprzewodowego sterowania prędkością oraz kierunkiem pojazdu.
Czujnik pola magnetycznego NXT

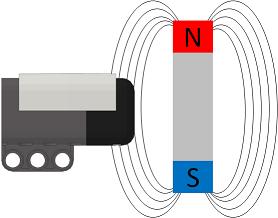
Czujnik ten wykrywa obecność pola magnetycznego jeżeli znajduje się w jego zasięgu. Wykorzystuje on analogowy interfejs czujnika, a wartość pola magnetycznego jest w stanie sczytać do 300 razy na sekundę.
Detektor sygnałów podczerwonych NXT

Czujnik ten, to wieloelementowy detektor podczerwieni. Potrafi on wykryć różne źródła promieni podczerwonych np.:
- promienie wysyłane pilotem TV
- promienie słoneczne
- promienie generowane przez HiTechnic IRBall
Detektor może pracować w jednym z dwóch trybów:
- Modulated mode:
W tym trybie czujnik będzie wykrywał modulowane promienie podczerwone, generowane np. przez piloty TV czy IRBall. Odfiltrowane zostaną natomiast wszystkie promienie pochodzące od oświetlania oraz promienie słoneczne.
- Un-modulated mode:
Ten tryb pozwala czujnikowi wykrywać nie modulowane promienie podczerwone, czyli promienie słoneczne oraz promienie generowane przez starsze wersje IRBall.
Czujnik wykorzystuje zaawansowane techniki cyfrowego przetwarzania sygnału, aby odfiltrować sygnały niepożądane. Specjalnie zaprojektowana obudowa odróżnia ten czujnik od pozostałych i znacznie zwiększa jego wydajność minimalizując zniekształcenia sygnałów. Wartości jakie detektor zwraca do programu przedstawiono na rysunku.
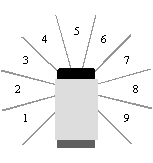
Wartości od 1-4 zwracane są jeżeli sygnał wykrywany jest z lewej strony czujnika, wartość 5 zwracana jest kiedy czujnik wykrywa sygnał przed sobą, natomiast wartości od 6-9 zwracane są gdy sygnał nadawany jest z prawej strony. Wartość 0 zwracana jest jeżeli żaden sygnał nie został wykryty.
HiTechnic Rotacaster

HiTechnic Rotacaster jest to wielokierunkowe koło idealne do budowy robotów poruszających się w każdym kierunku. Model może poruszać się do przodu, tyłu, na boki oraz w każdym kierunku pomiędzy dzięki zastosowaniu trzech lub czterech kółek Rotacaster. Kółka te są świetną alternatywą dla zwykłych rolek odkąd mogą poruszać się w każdym kierunku. Dzięki zastosowaniu kompatybilnej z krzyżowymi osiami piaście, kółka te mogą być z łatwością stosowane do każdego modelu MINDSTORMS czy Technics. Rotacasters produkowane są z niskotarciowymi rolkami dzięki czemu zapewniają łatwe poruszanie się w każdym kierunku.
Już niebawem więcej informacji o nowościach w świecie mindstorms
Już niebawem informacje o nowościach w świecie mindstorms